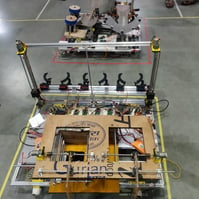
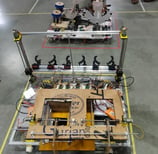
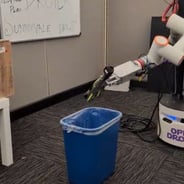
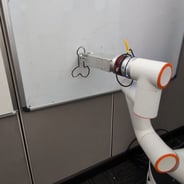
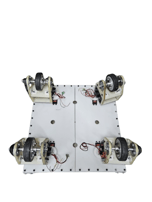
R1D1
R1D1 is something that I am very proud of as an Engineer, I have been the lead Engineer to design, carry out fabrication and program this robot, one can say I have worked from building this robot from scratch to making it do autonomous tasks. from autonomous navigation, sensor fusion, copmuter vision based manipulation, LLM integration, making it demo ready to launch at CES 2025, to making the robot draw penis for making a viral video, I have pretty much left no stone unturned contributed in everything while working with this robot. I have also been working on a newer better design R1D3 of the robot which will be fabricated, assembled and ready to roll by end 2nd week of February 2025. The key optimisation we could achieve includes 20-30% weight reduction, visually aesthic design, better power to weight ratio for robotic arm and reduction in overall height by 20-25% while keeping the same working envelope.




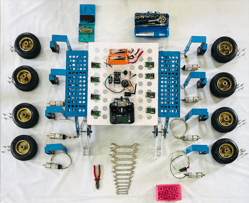
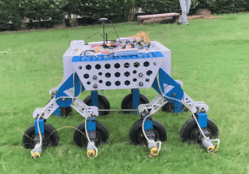
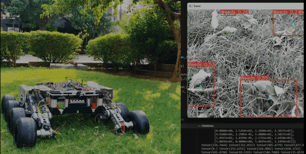
KISAAN ROVER
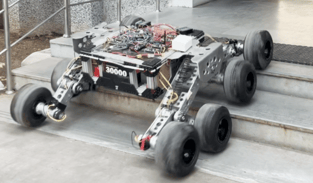

KISAAN Rover is a project I did while I was pursuing Bachelors degree in Mechatronics, we made this 8 wheeled UGV for application which was inclined towards increasing efficiency in farming by using precision farming techniques. As India is a farming hub me and my team members thought automation can play a huge role in tackling a major problem of lack of labour in farming or inflated labour prices, this rover was GPS based rover which could carry out autonomous weeding and seeding using deep learning. we built 2 versions of this robot one PoC and one final version.

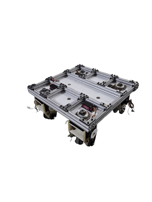
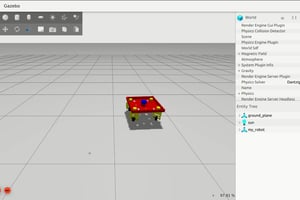
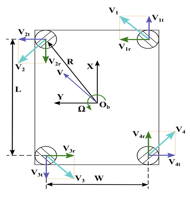
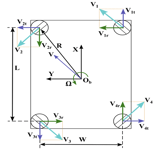
ROS2 Controller for 4WD Swerve AMR
This is one of most recent project, I was working on a 4 wheeled swerve drive AMR, which is basically a robot which has 4 wheels with independent steering allowing the wheels to rotate along z-axis making the robot holonomic, when I was developing the control layer of the robot, I realized, the most vastly used framework ROS/ROS2 for robotics didn't have controller for these kind of robots, I grabbed the opportunity and developed one by solving kinematic equations and using them to make a basic controller which can be interfaced with any kind of game pad (x-box, ps4-5), I opened source it and posted it one Linkedin, people seem to love it, I got 30K + post views, 17 stars on the github repository and significant faces of robotics reposted it.
This is a hobby project I did in 2023 as I had some stepper motors lying around, I made this project in which first you scan all the sides of the Rubiks cube by placing it in front of the camera, once scanned you need to place it in a arrangement of these motors which will automatically solve it. The main highlight of this project would be integration of OpenCV with embedded systems, I used a 3D printer shield to program these motors. My control algorithm was to get the rotations that are required via "kociemba" library and then convert those rotations to G-code and use that to control the stepper motors.


Open CV based Automatic Rubiks Cube Solver
In February 2023 I joined Larsen & Toubro Defence for an internship, where I developed this in-house design of an automatic welding carriage, the main motive behind this project as suggested by my mentor was to mitigate the reliance on suppliers for these kind of equipments which had inflated prices due to prolonged period of dependency on supply from the same vendors. I closely worked with my mentor to come up with a design concept which was just not cost effective but a Special Purpose Machine for their application.
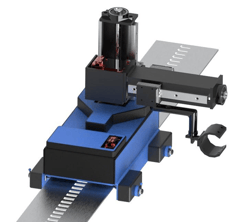
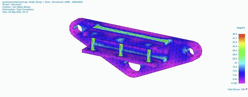
Automatic Welding Carriage
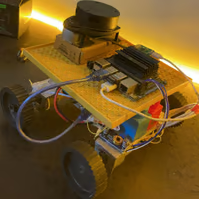
Throughout my Robotics and Automation journey so far I have built and worked on a lot of projects some which I highlight here and many which were stepping stones along this journey, some them include smart hydroponics system, robots for competitions, DIY project which got featured in yearly electronics magazine, hobby mobile robot project with edge computing and lidar odometry, etc. So far I have learnt a lot thanks to also these small projects which teach you a huge deal of lessons.
Many more projects